Leading the embedded systems student org — organizing projects, mentoring members, and overseeing technical direction across the team.
Working on autonomous embedded systems research and building a classifier for insect identification.
Developing interconnection strategies for printed polymer composites for temperature sensing. Fabricated composite laminates using conductive filament, ran FEA thermal and stress models, and reviewed 100+ papers contributing to a state-of-the-art survey on memory-enabled sensing materials.
Developing embedded firmware for an NRF52840 to wirelessly transmit real-time resistivity data using BLE. Designing carbon filament-based sensors for stress, strain, and structural damage detection and fabricated 15 CNF-modified PLA composite dogbone specimens to characterize electrical resistivity.
Building a hardware-in-the-loop test system for UAV's — writing drivers for LIDAR, hover control, and sensor input on ESP32 with Zephyr RTOS
Built the monitoring and control software for Maelstrom, a 500-lbf kerosene-LOX rocket engine — real-time sensor acquisition, valve control, and emergency shutdown, all integrated through a P&ID interface
Conducted fuzz testing on open-source applications including FFmpeg and Calibre using AFL++ and Snapchange, analyzing code coverage and application behavior to identify potential vulnerabilities.
B.S. in Electrical Engineering
Concurrently serving as President of Embedded Systems @ Purdue and working as a researcher across three labs
Graduated Summa Cum Laude (4.83/4.00 GPA)
Speech & Debate Team - 2nd, Scottsdale Prep BQ Debate
Computer Science CTSO Social Media Manager
FBLA - 3rd Parliamentary Procedure; 2nd UX Design
 View Project
View Project
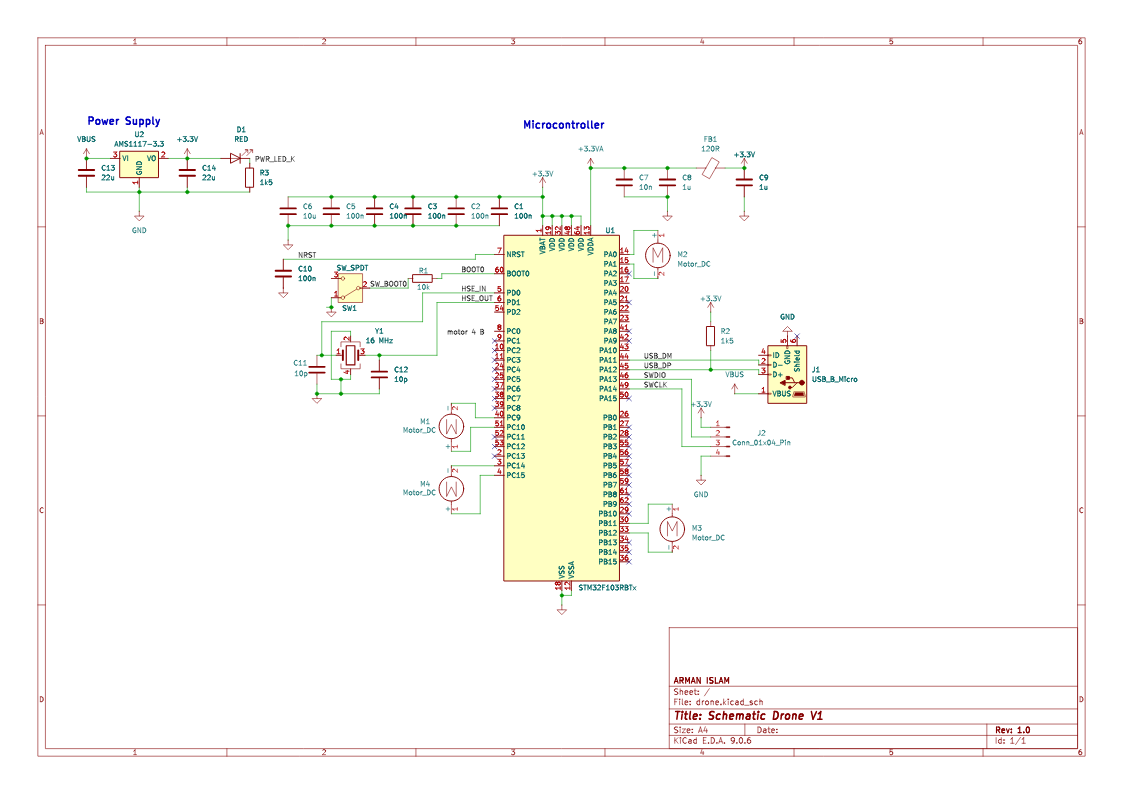
Baremetal Drone
Over the summer of 2025 I worked on a project to create a drone. I had three options, to do this with Arduino, use existing HAL/STM Drivers, or to do the whole project from scratch AKA Baremetal. I decided to do baremetal to get more familarity with how microcontrollers work. All the drivers and code for this project is written by me excped for the linker script.
 View Project
View Project
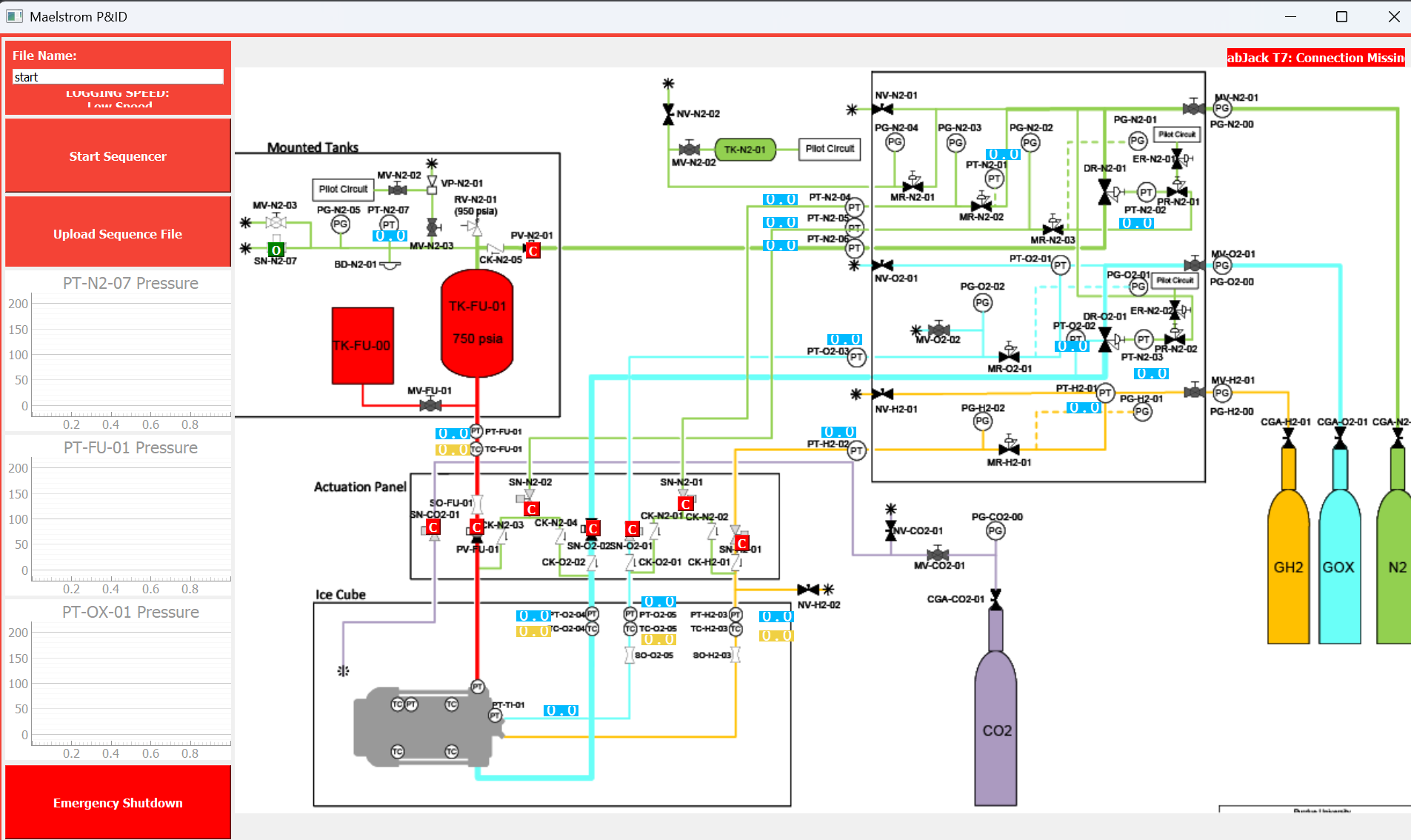
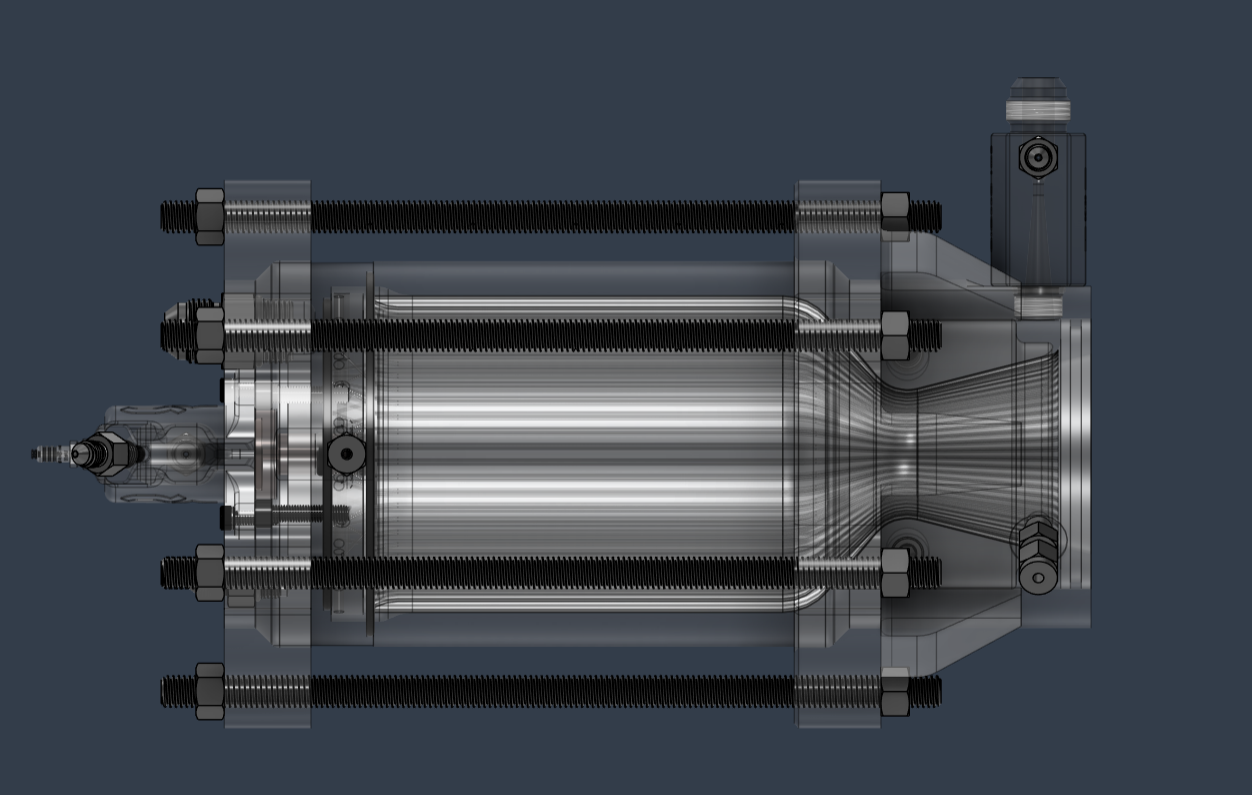
Rocket Monitoring & Control Program
Piping and Instrumentation Diagrams (P&IDs) are detailed schematic representations of fluid systems that illustrate the relationships between piping, valves, sensors, actuators, and control elements. P&IDs are critically important because they act as the source of information for system design and operation when on field. In other words, they allow us to verify valve sequencing, sensor coverage, and safety mechanisms before and during hardware is deployed.
In the context of the Maelstrom project, a 500-lbf kerosene/LOX heat-sink rocket engine, I developed a P&ID-based software program to represent the engine’s propellant feed and control architecture. The diagram captured LOX and kerosene supply lines, pneumatic and solenoid valves, pressure and temperature sensors. This P&ID served as the foundation for integrating sensor acquisition, valve control logic, and system feedback during engine development and testing.
For example, through this application, if the team sees unstable pressure or results that seem abnormal, we can press the emergency shutdown to place the system in a safe state. Or if our test is safe and we follow through, but the test produces unexpected results, we can look at the generated graphs to identify which valve or solenoid could have been the cause for the result.
The P&ID program was integrated with a LabJack control device, which acted as the interface between the software and the hardware. The LabJack driver handled analog inputs from pressure and temperature sensors and digital outputs to control valves, and I utilized the sensor feedback to monitor system state, validate control logic, and support safe engine operation.
 View Project
View Project
ARIES Lab - Research Intern
The Autonomous Robotics and Intelligent Engineering Systems (ARIES) Lab at Purdue University. Currently I am working on a classifier for insects.
View Project
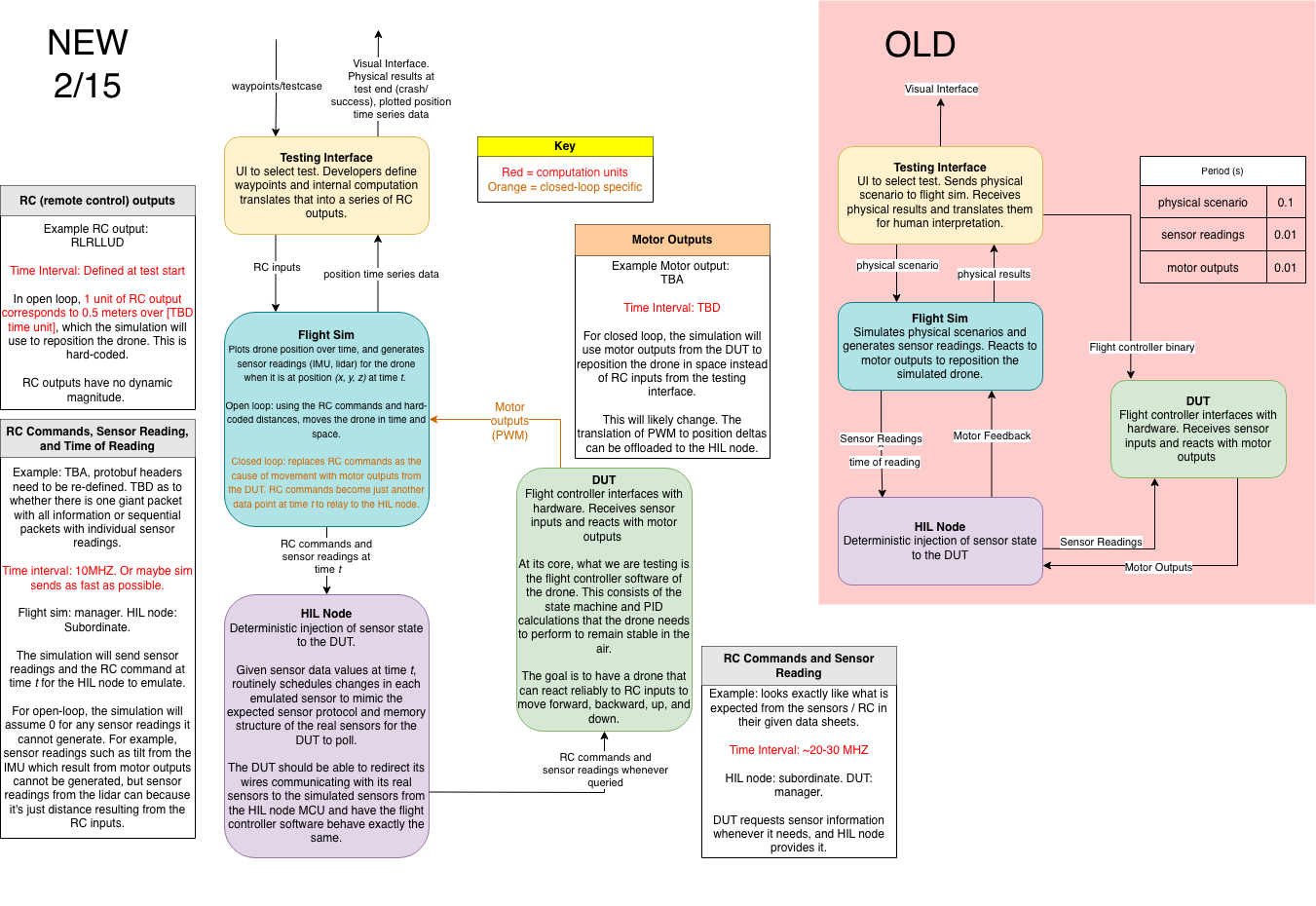
UAV Hardware in the Loop System
drone flight hardware-in-the-loop simulation system. Essentially: make the drone think it is flying before you risk your hardware.
DUT: the drone itself. The subteam is building flight controller software.
HIL node: the deterministic injection system that simulates the DUT's sensors using the simulation's outputs.
Flight Sim: The physics simulation that generates sensor outputs for the DUT under specified physical scenarios.
Test Automation: The front-end interface for user interaction with the HIL system.
 View Project
View Project
ASU Cybersecurity Fuzzing
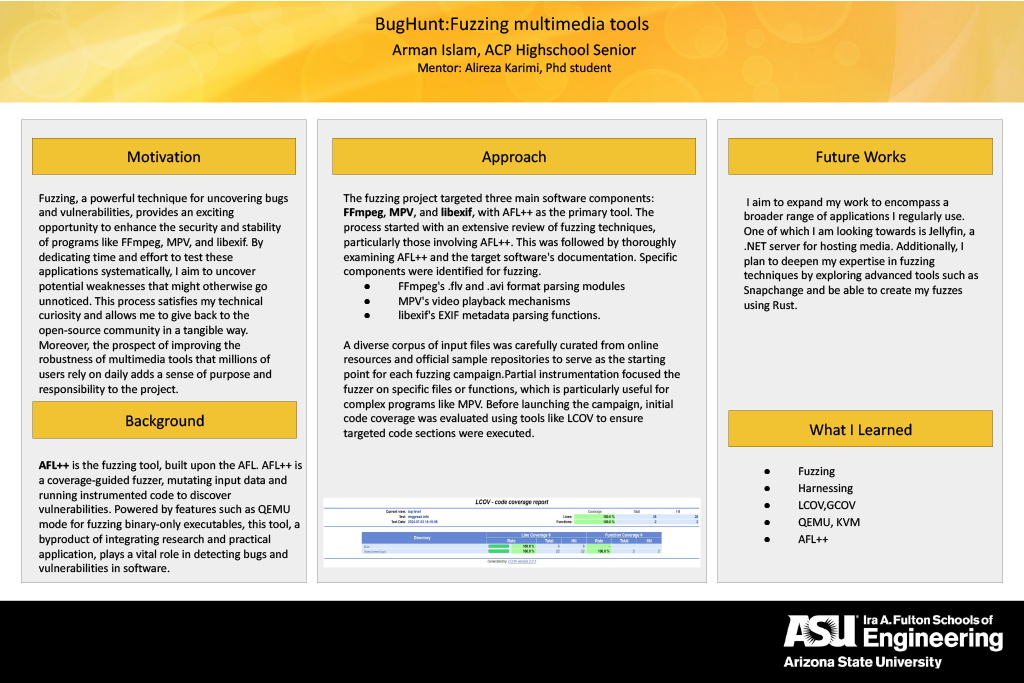
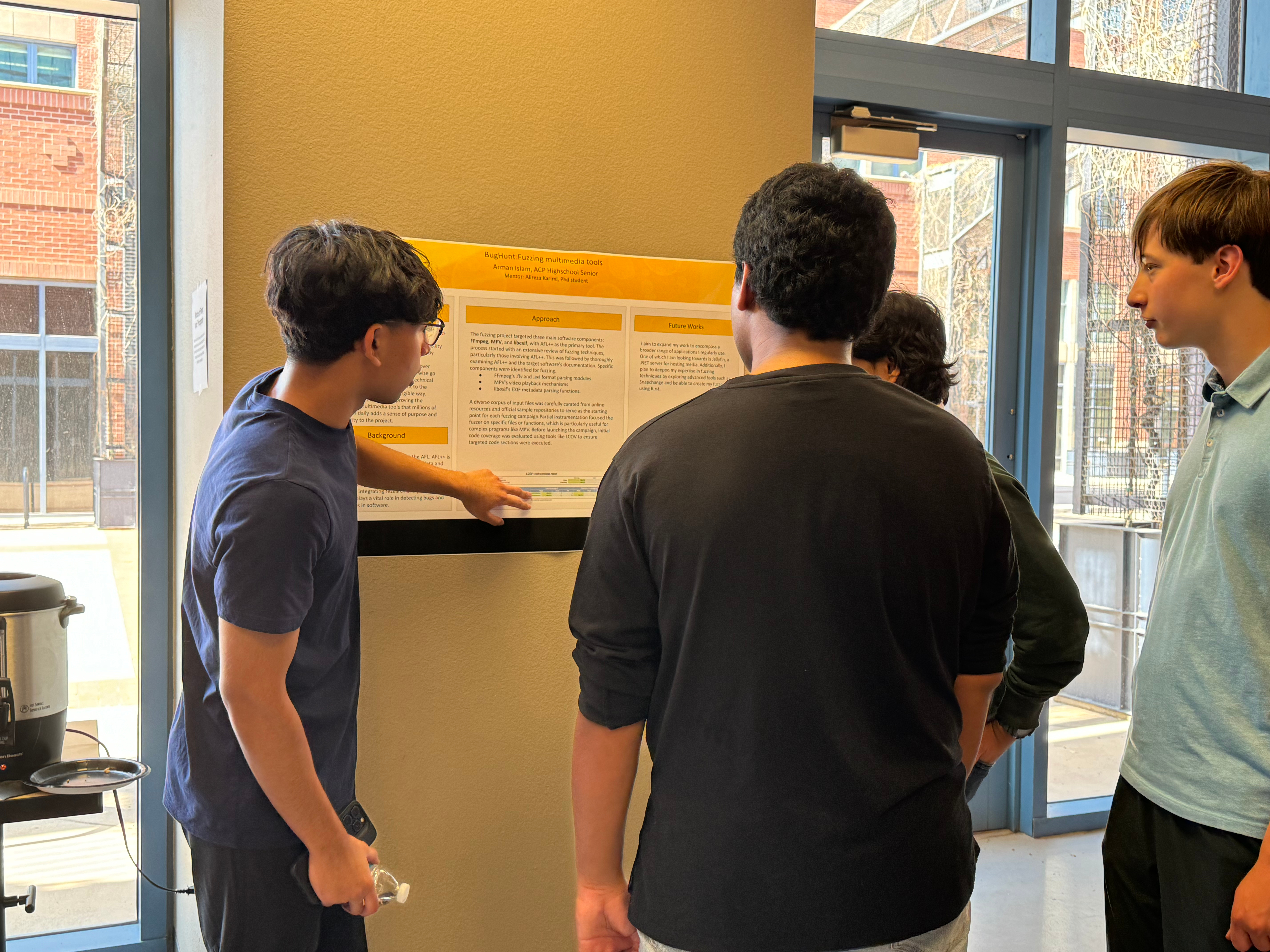
During the Summer of 2024, I conducted cybersecurity research at Arizona State University on fuzz testing, a technique used to discover vulnerabilities in computer software and systems. My responsibility was to apply coverage guided fuzzing to identify bugs and potential security flaws in open source applications including FFmpeg, MPV, libexif, Jellyfin Media Server, and Calibre’s.
I worked with multiple input corpuses and fuzzing strategies using AFL++ and Snapchange, leveraging gcov and lcov to analyze code coverage to guide input generation. If I was to find a crash, GDB was to be used for the analysis. Additionally, low-level Linux debugging and application behavior analysis were used to assess exploitability, skills I developed throughout the internship.
At the end of the internship, I presented my findings and learning outcomes in a poster session to fellow interns and PhD researchers.
under this add a problems section and how i solved them.
 View Project
View Project
Herrick Laboratories - Embedded Thermal Sensing
Research Intern at Herrick working on embedded thermal sensing in AM Manufacturing processes.
 View Project
View Project
SMART MAT: Self-Sensing Materials and Aircraft Structural Health Monitoring
Designed carbon filament-based sensors embedded in aircraft structures for stress, strain, and damage detection. Develoepd embedded firmware for an NRF52840 to wirelessly transmit real-time resistivity data using BLE.
islam149@purdue.edu
Arizona
Category - Embedded Systems
Lorem ipsum dolor, sit Lorem ipsum dolor sit amet consectetur adipisicing elit. Quidem perferendis corporis culpa! amet consectetur adipisicing elit. Hic doloribus labore assumenda nostrum commodi. Officia. Lorem ipsum dolor sit amet consectetur adipisicing elit. Incidunt.